Select Publications
3D Datasets and Fast Simulation for Embodied AI and Robotics
Habitat 2.0: Training Home Assistants to Rearrange their Habitat
Neural Information Processing Systems (NeurIPS), 2021.
Spotlight talk, top 3% of 9122 submissions

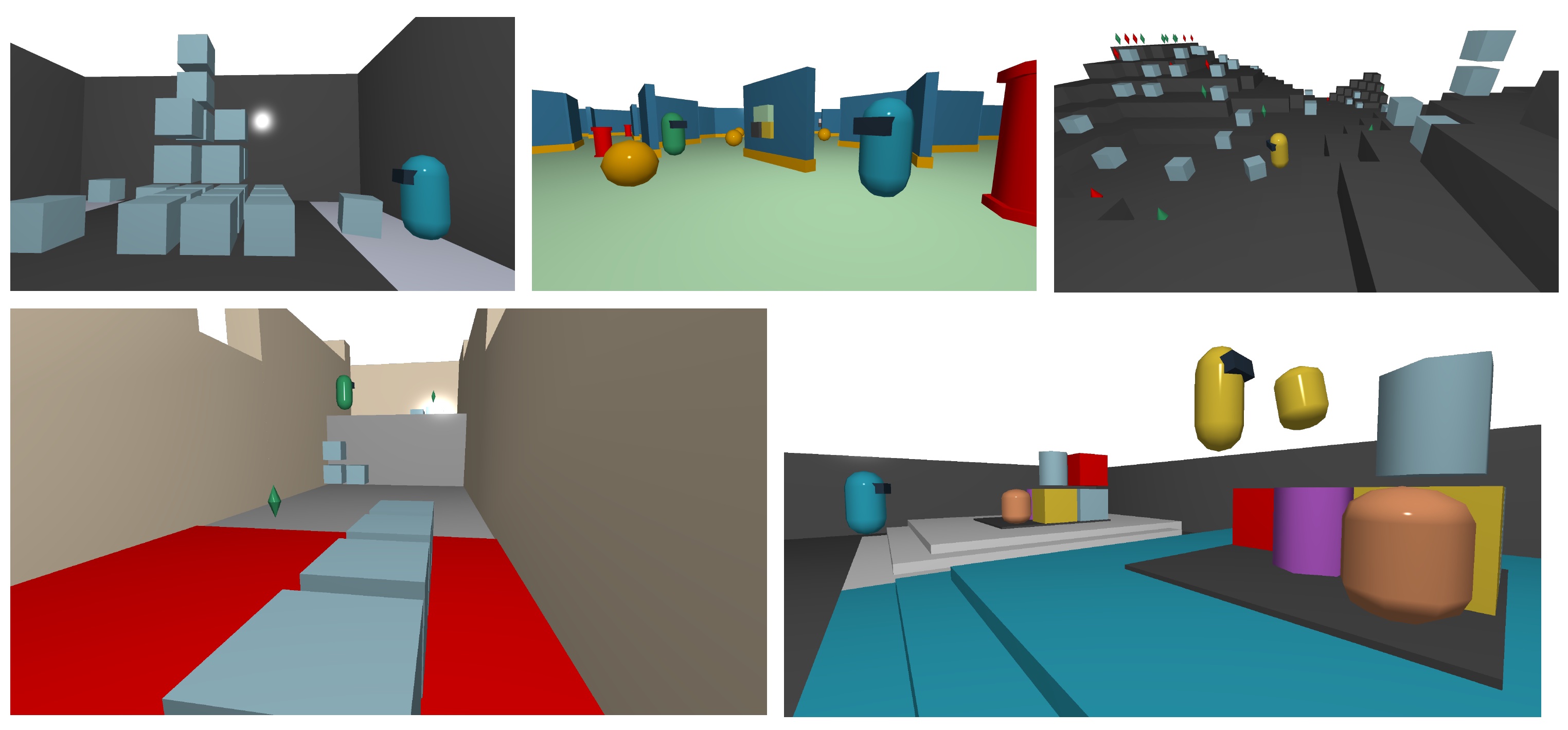
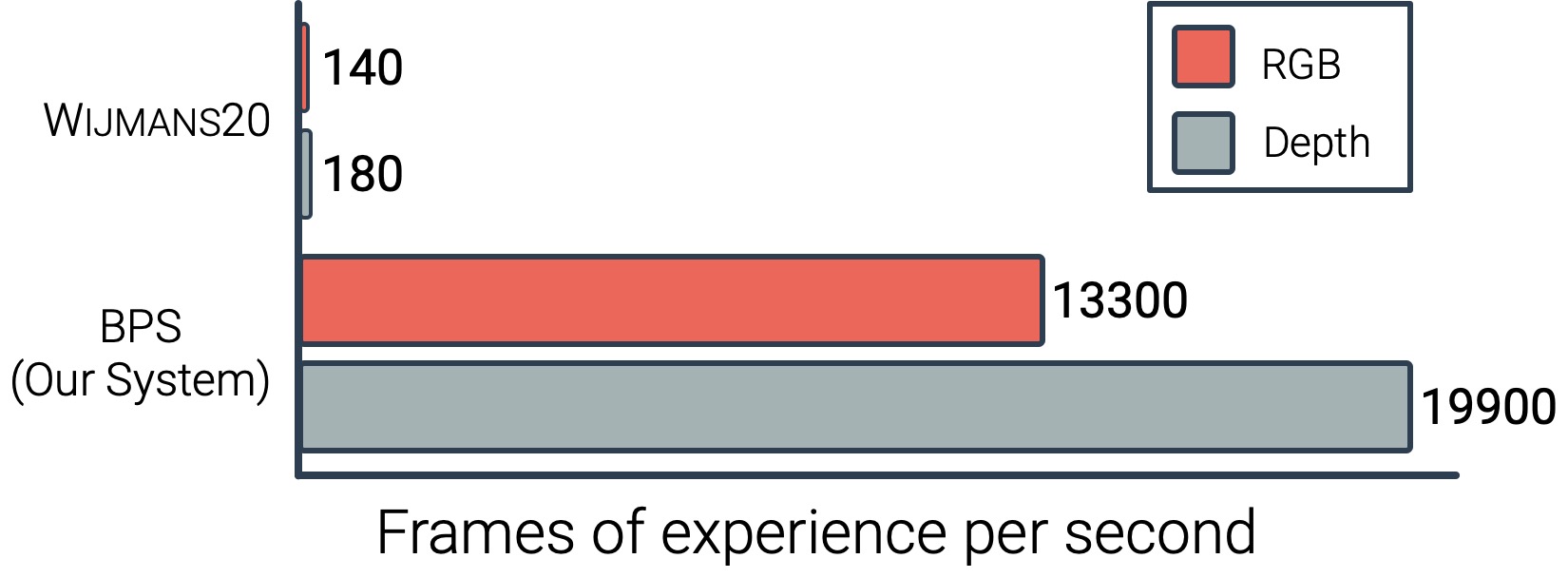
Megaverse: Simulating Embodied Agents at One Million Experiences per Second
International Conference on Machine Learning (ICML), 2021.
1184 out of 5513 submissions = 21%
1184 out of 5513 submissions = 21%
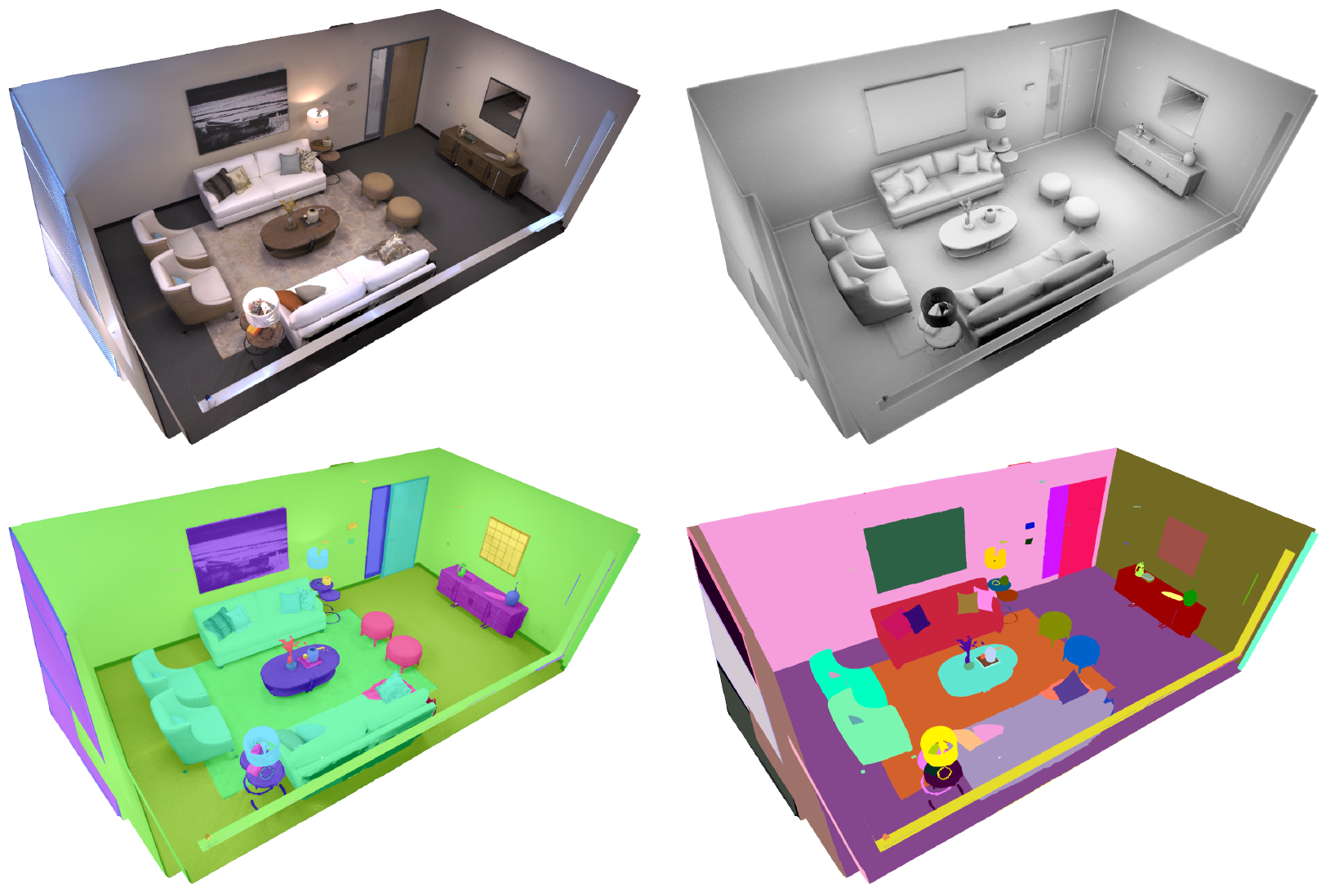
Habitat: A Platform for Embodied AI Research
International Conference on Computer Vision (ICCV), 2019.
Oral talk, top 187 of 4303 submissions = top-4.3%
Best Paper Award Nominee, top 11 of 4303 submissions = top-0.25%
Characterizing Emergent Intelligence
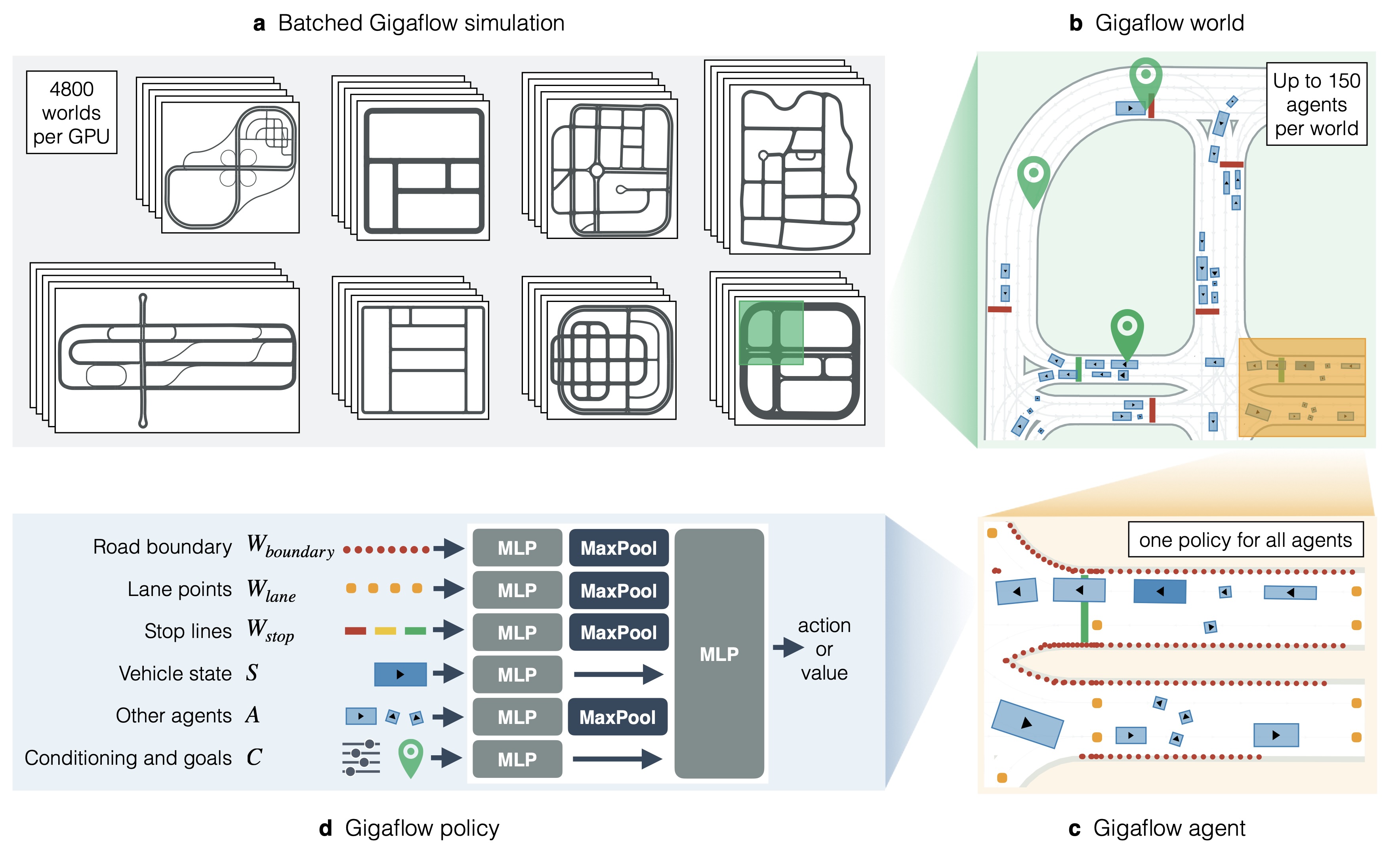
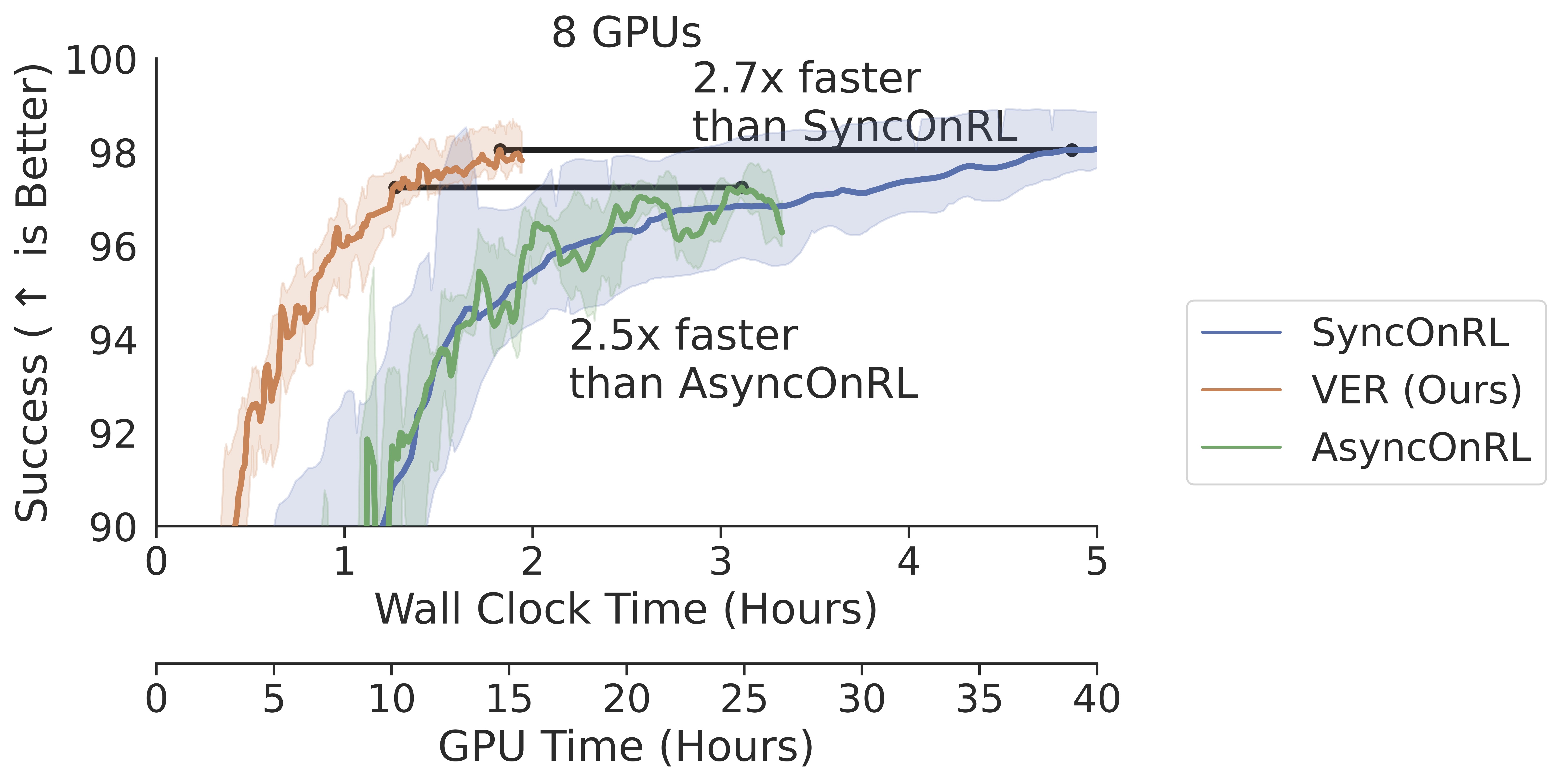
Robust Autonomy Emerges from Self-Play
arXiv, 2025.
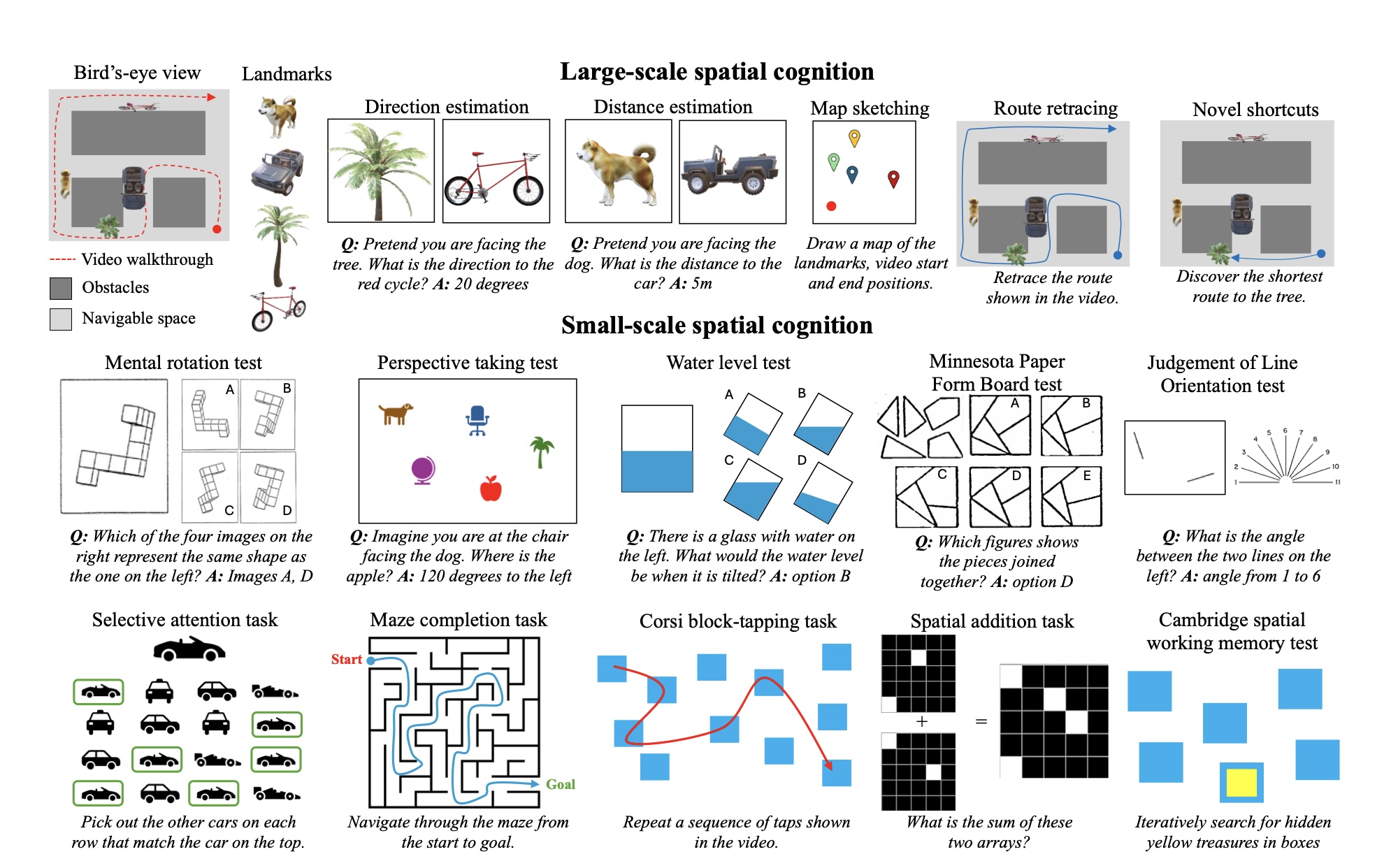
Does Spatial Cognition Emerge in Frontier Models?
International Conference on Learning Representations (ICLR), 2025.
Emergence of Maps in the Memories of Blind Navigation Agents
International Conference on Learning Representations (ICLR), 2023.
Notable Top-5% (Oral), 91 out of 4900 submissions = top-1.8% of submitted papers
Outstanding Paper Award, 4 out of 4900 submissions = top-0.08%

Large-scale Machine Learning
Robust Autonomy Emerges from Self-Play
arXiv, 2025.
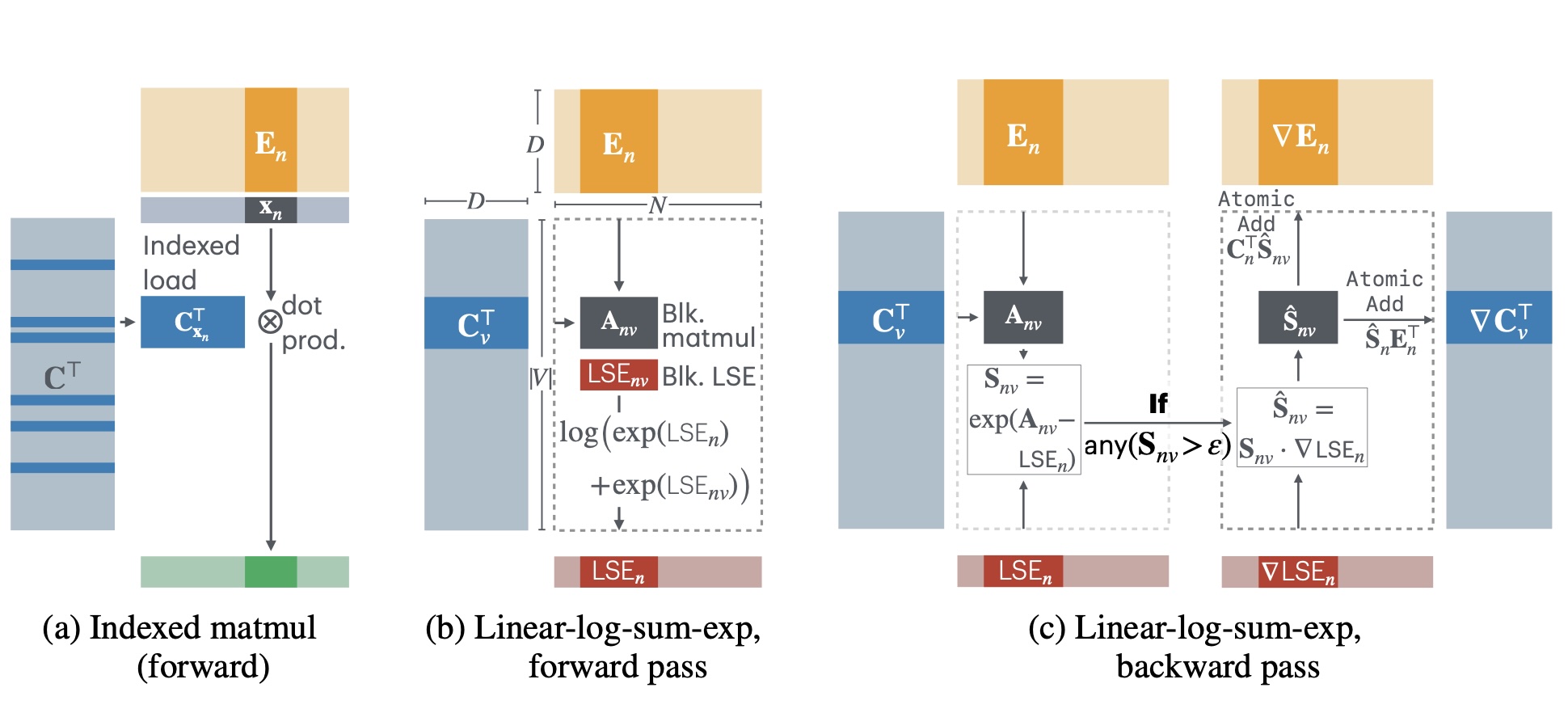
Cut Your Losses in Large-Vocabulary Language Models
International Conference on Learning Representations (ICLR), 2025.
Oral talk, 207 out of 11,500 submissions = top-1.8% of submitted papers
DD-PPO: Learning Near-Perfect PointGoal Navigators from 2.5 Billion Frames
ICLR,
2020.
687 out of 2594 submissions = 26.5%
687 out of 2594 submissions = 26.5%