Select Publications
1) Characterizing Emergent Intelligence
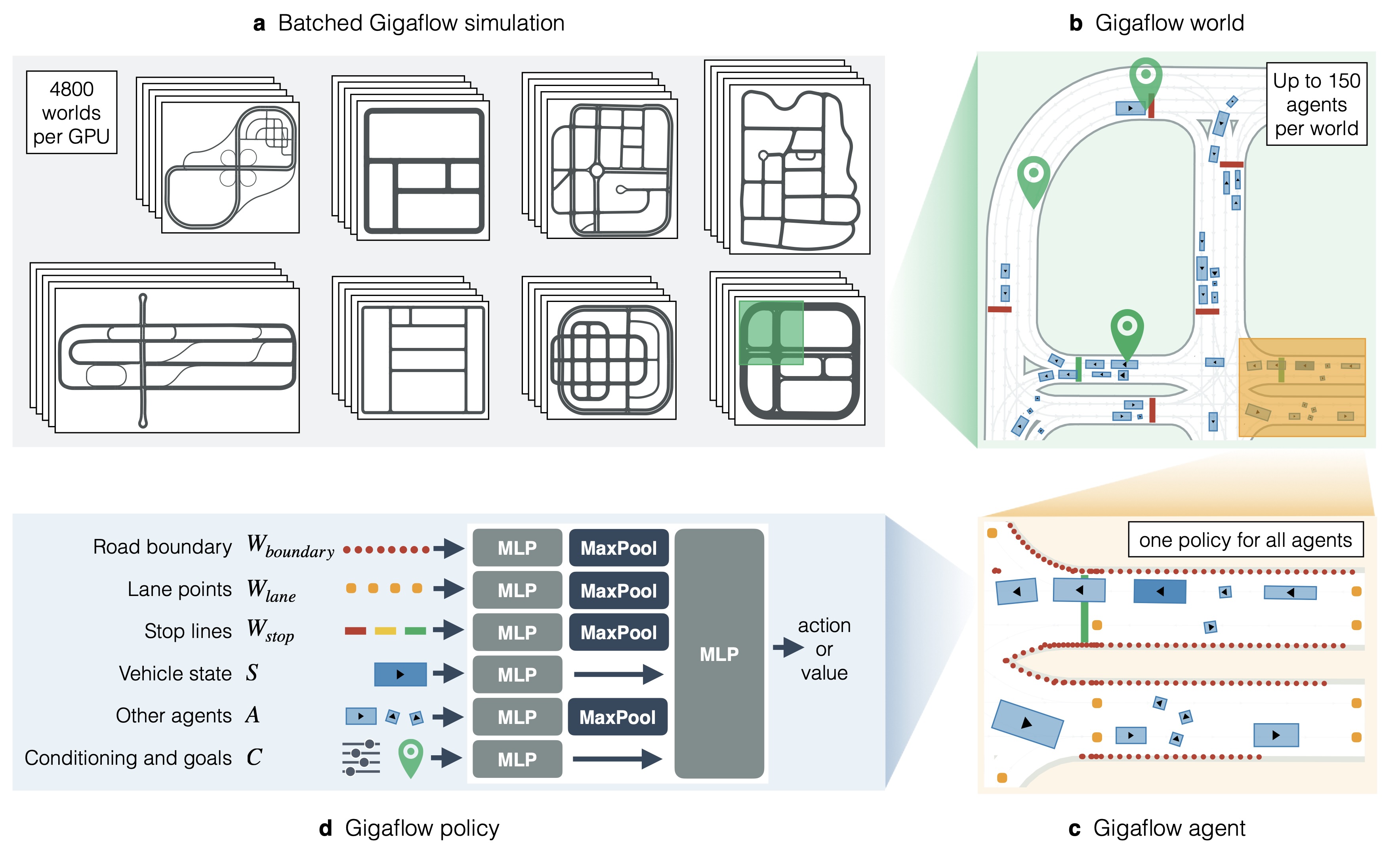
Robust Autonomy Emerges from Self-Play
International Conference on Machine Learning (ICML), 2025.
Acceptance: 3,260 out of 12,107 submission = 26.9%
Acceptance: 3,260 out of 12,107 submission = 26.9%
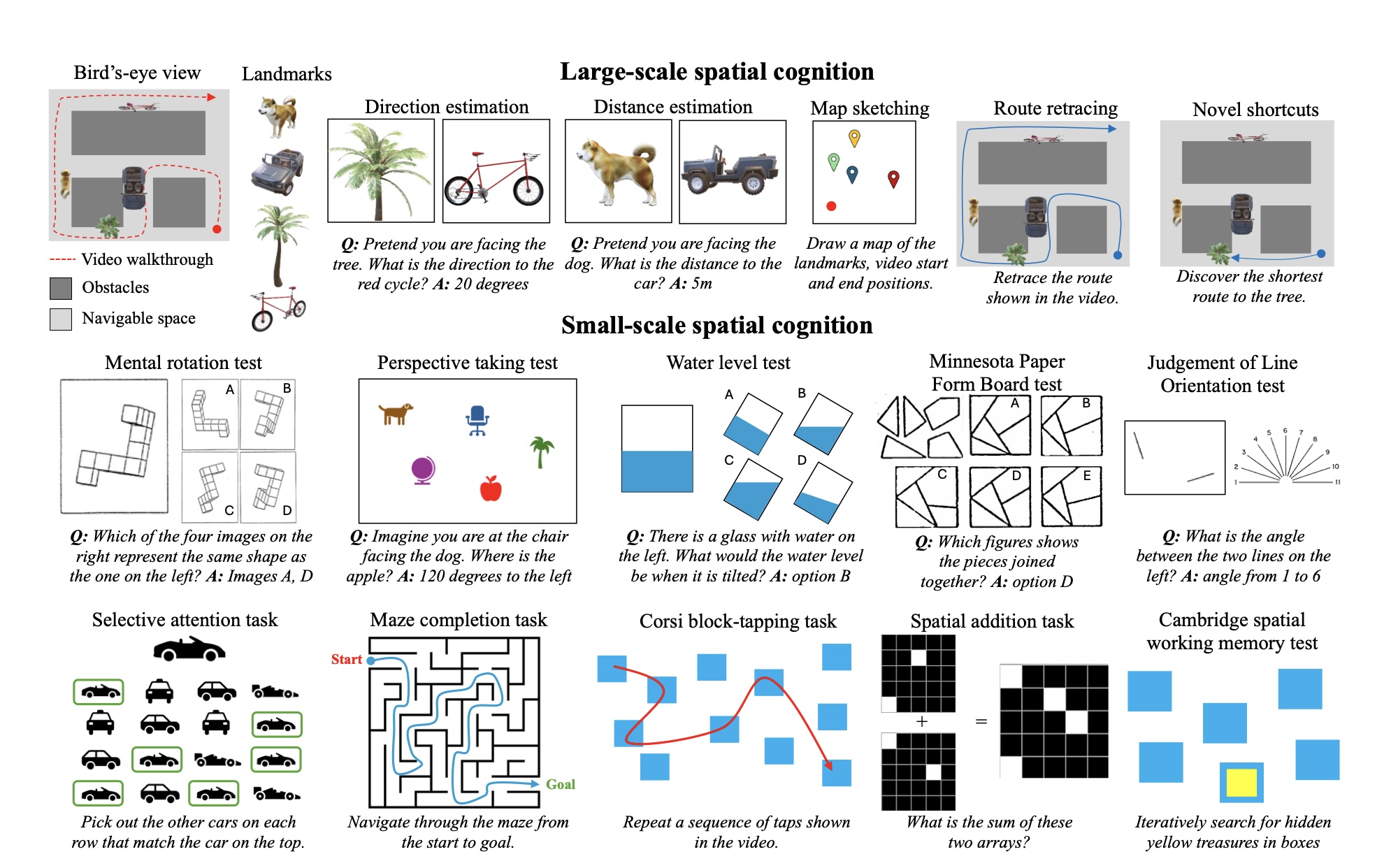
Does Spatial Cognition Emerge in Frontier Models?
International Conference on Learning Representations (ICLR), 2025.
Acceptance: 3,704 out of 11,672 submissions = 31.7%
Acceptance: 3,704 out of 11,672 submissions = 31.7%
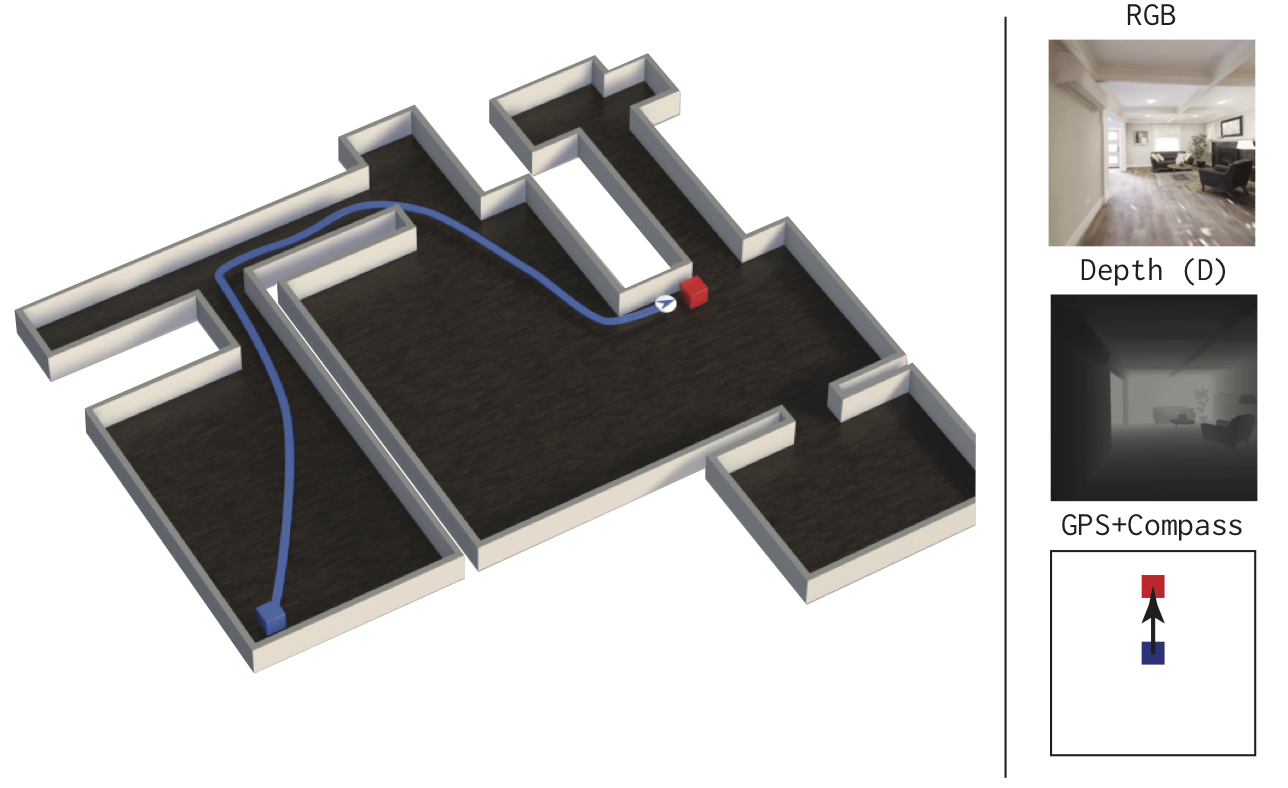
Emergence of Maps in the Memories of Blind Navigation Agents
International Conference on Learning Representations (ICLR), 2023.
Notable Top-5% (Oral), 91 out of 4900 submissions = top-1.8% of submitted papers
Outstanding Paper Award, 4 out of 4900 submissions = top-0.08%

2) Large-scale Machine Learning
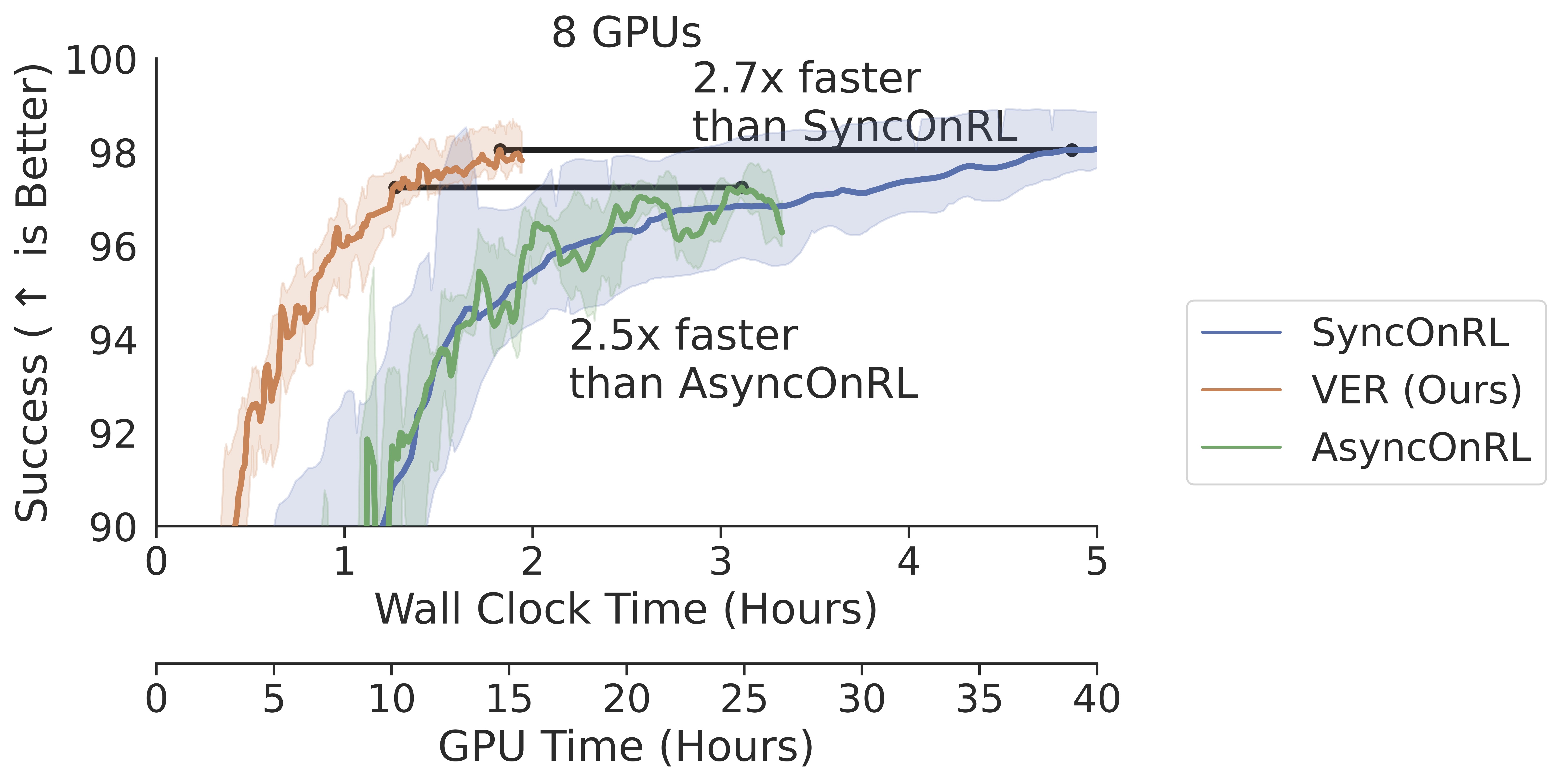
DD-PPO: Learning Near-Perfect PointGoal Navigators from 2.5 Billion Frames
ICLR,
2020.
687 out of 2594 submissions = 26.5%
687 out of 2594 submissions = 26.5%
3) 3D Datasets and Fast Simulation for Embodied AI and Robotics
Habitat 2.0: Training Home Assistants to Rearrange their Habitat
Neural Information Processing Systems (NeurIPS), 2021.
Spotlight talk, top 3% of 9122 submissions

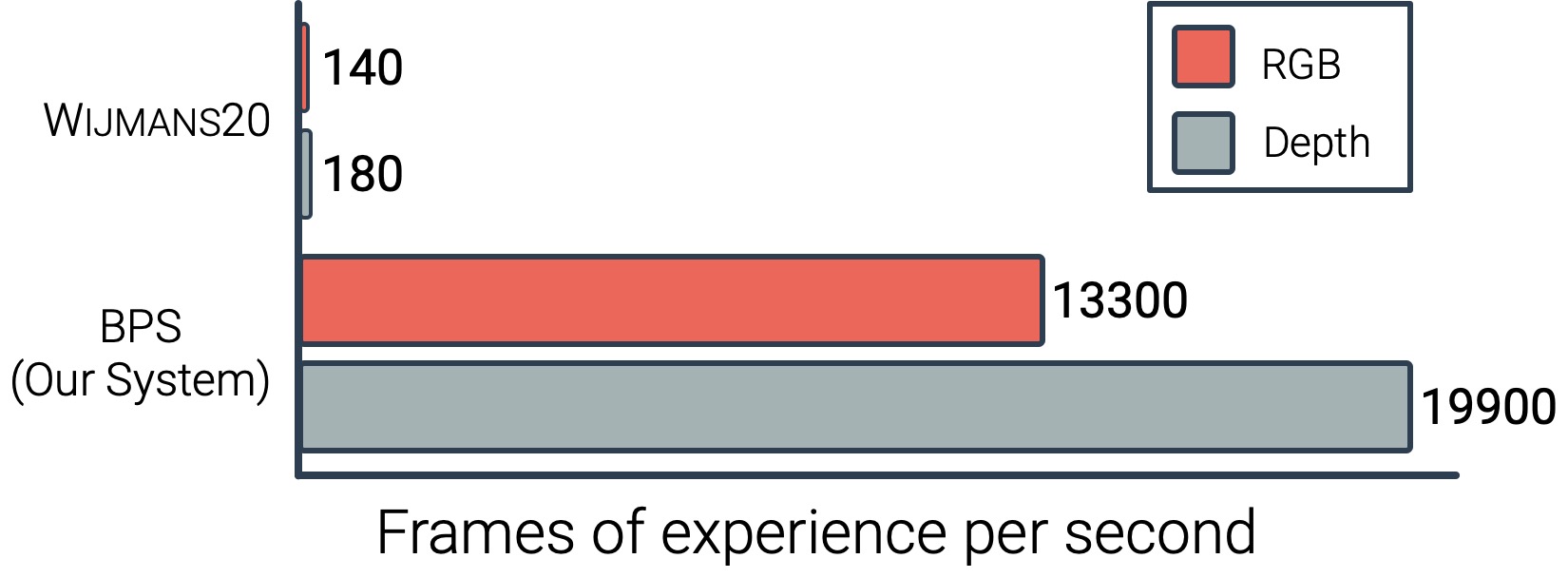
Megaverse: Simulating Embodied Agents at One Million Experiences per Second
International Conference on Machine Learning (ICML), 2021.
1184 out of 5513 submissions = 21%
1184 out of 5513 submissions = 21%
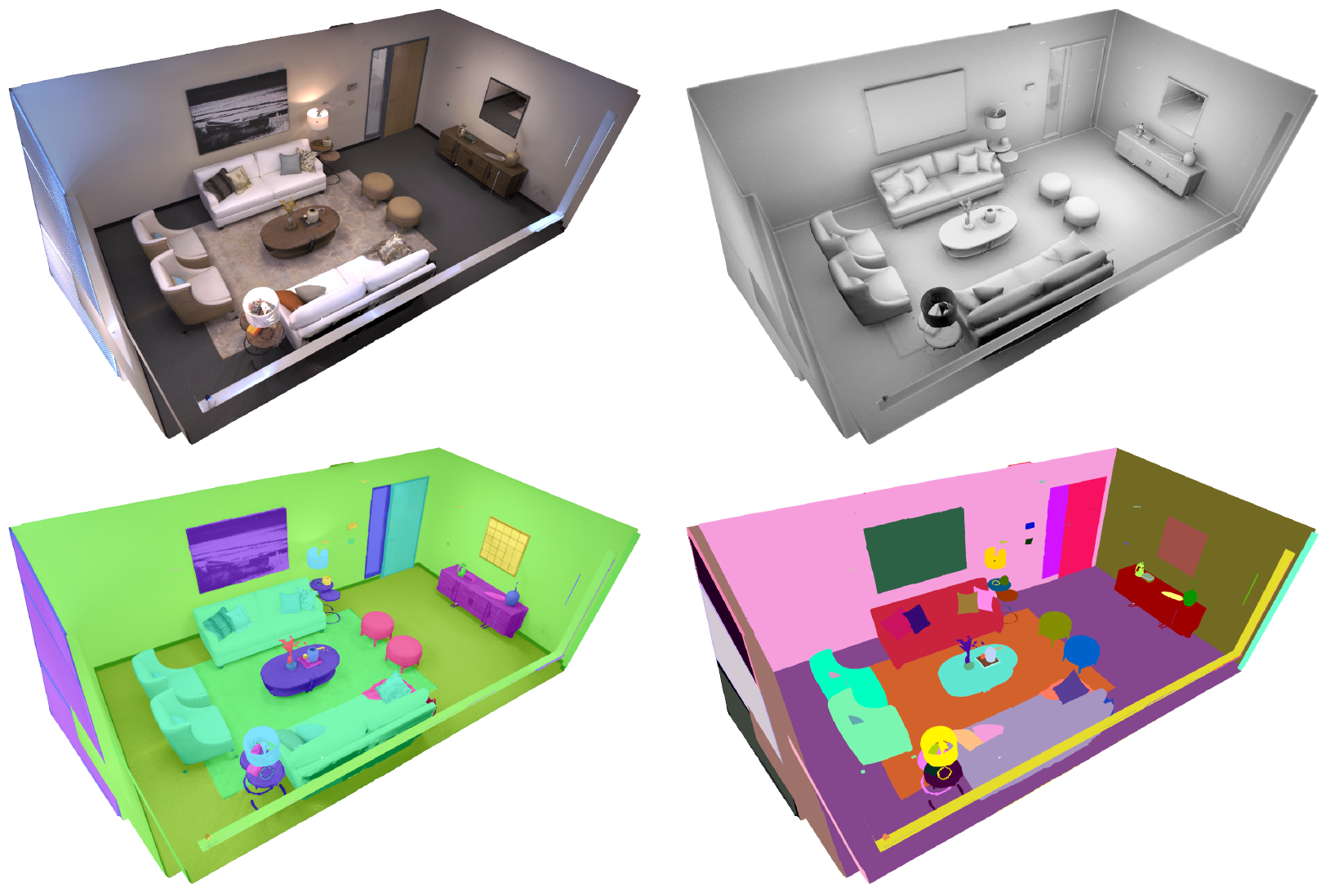
Habitat: A Platform for Embodied AI Research
International Conference on Computer Vision (ICCV), 2019.
Oral talk, top 187 of 4303 submissions = top-4.3%
Best Paper Award Nominee, top 11 of 4303 submissions = top-0.25%